Videos

|
SPA algorithm on a large dataset,
with 3755 nodes and 7352 constraints. The first segment is an
incremental method showing fast realtime performance: the nodes are
pulled sequentially from a file and optimized incrementally. The
system slows down at the end because of the drawing, not the
optimization.
The second segment is batch
mode, with all nodes initialized from odometry - the red lines show
cross-constraints that are highly stressed. The final segment
shows SPA again in
batch mode, with all the nodes at the origin, and with their
orientation derived from odometry; successive iterations of SPA move
the graph to its final position.
Download video: Mpeg 4 (6.6 MB) |
|
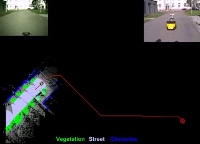
Autonomous navigation experiment. Although the shortest
obstacle-free path from the start to the goal position led over
grass, the robot could reliably avoid the vegetated areas by using
our vegetation classifier and traveled over the paved streets to
reach its goal. Download video: MS Mpeg 4v2 (4.5 MB) |

|
Evaluating the results of SLAM algorithms using a graph of relations. Download video: Xvid Avi (2 MB) |

|
Graph-based SLAM using aerial images as prior information. Download video: Xvid Avi (58 MB) Aerial image via maps.google.com |

|
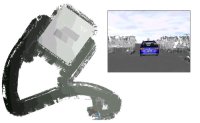
Autonomous navigation in a multi-level parking garage and the surrounding environment.
The car parks itself on a defined parking spot on the upper level of the garage. Download video: Xvid Avi (9 MB) WMV (11 MB) View online: Flash (5 MB) |
|
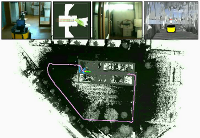
Autonomous indoor / outdoor navigation. The robot starts on the first floor of a building. After leaving
the building, the robot re-renters the same building on the second floor. Download video: Xvid Avi (21 MB) |
|
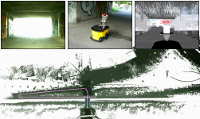
Autonomous outdoor navigation. The robot drives through an underpass and over the corresponding bridge. Download video: Xvid Avi (12 MB) |
|
Localization (position tracking) in a MLS Map of a multi-level parking garage and the surrounding environment. Download video: Xvid Avi (50 MB) Download VRML file: gzipped VRML (44 MB) |
|
Localization (position tracking) in a MLS Map of the environment around the building 079. Download video: Xvid Avi (19 MB) Aerial image via maps.live.com |
|
Localization (position tracking) in a MLS Map of the environment around the train station "Freiburg Messe". Download video: Xvid Avi (15 MB) Aerial image via maps.live.com |
