3D Point Cloud People Dataset
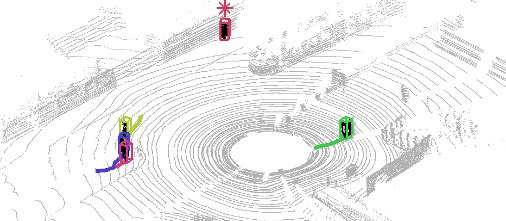
Annotated people and tracks in 3D Velodyne data
Description
This dataset contains 100+ RGB-D frames acquired in downtown Zurich, Switzerland. The first data
set, named Polyterrasse, has been collected in a large area in
the front of the ETH Zurich main building (Switzerland), accessible only
to people and bicycles. The second data set, named Tannenstrasse, has been collected on a busy street crossing in downtown Zurich with trams, cars, pedestrians, or bicycles.
>> Both detections and tracks are annotated
If you are considering using this data, please reference the following:
The dataset can be download from http://www.informatik.uni-freiburg.de/~spinello/sw/pcloud_people.tar.gz
A Velodyne HDL 64E S2 sensor has been used to acquire data. It rotates with a frequency of 5Hz at a maximum range limited to 20m. This produces around 120,000 points per 3D scan.
Each point cloud is saved as a separate file with .ezd extension ((e.g.: ts2_sliced0000.ezd). It is a text file with four columns, indicating the position of a scanned point in space: X, Y, Z, velodyne layer.
Each frame (e.g.: ts2_sliced0000.ezd) is annotated in a file named as the frame but with extension .bbox (e.g: ts2_sliced0000.ezd.bbox). It is a text file in which each line represents a person annotation. Each line has seven columns:
Each annotated track is defined in a file (e.g: ts2_slicedT0001.track). The content of a track file is as following:

Copyright (c) 2011 Luciano Spinello, Matthias Luber, Rudolph Triebel and Kai O. Arras
This work is licensed under a Creative Commons Attribution-Noncommercial-Share Alike 3.0 Unported License.
>> Both detections and tracks are annotated
Citations
If you are considering using this data, please reference the following:
- [1] L. Spinello, K. O. Arras, R. Triebel and R. Siegwart A Layered Approach to People Detection in 3D Range Data. Proc. of The AAAI Conference on Artificial Intelligence (AAAI), 2010.
- [2] L. Spinello, M. Luber and and K. O. Arras Tracking People in 3D Using a Bottom-Up Top-Down Detector. IEEE Int. Conf. on Robotics and Automation (ICRA), 2011.
Download
The dataset can be download from http://www.informatik.uni-freiburg.de/~spinello/sw/pcloud_people.tar.gz
Sensory Setup
A Velodyne HDL 64E S2 sensor has been used to acquire data. It rotates with a frequency of 5Hz at a maximum range limited to 20m. This produces around 120,000 points per 3D scan.
Point Cloud Format
Each point cloud is saved as a separate file with .ezd extension ((e.g.: ts2_sliced0000.ezd). It is a text file with four columns, indicating the position of a scanned point in space: X, Y, Z, velodyne layer.
Detection Annotation Format
Each frame (e.g.: ts2_sliced0000.ezd) is annotated in a file named as the frame but with extension .bbox (e.g: ts2_sliced0000.ezd.bbox). It is a text file in which each line represents a person annotation. Each line has seven columns:
X,Y,Z: center of the 3D bounding box W,D,H: size of the 3D bounding box VSB: [0 = visible, 1 = partially visible]
Tracking Annotation Format
Each annotated track is defined in a file (e.g: ts2_slicedT0001.track). The content of a track file is as following:
NFILE: point cloud frame name X,Y,Z: center of the track in 3D
Copyright and License Information
Copyright (c) 2011 Luciano Spinello, Matthias Luber, Rudolph Triebel and Kai O. Arras
This work is licensed under a Creative Commons Attribution-Noncommercial-Share Alike 3.0 Unported License.
This dataset is distributed WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.