|
main page |
Chapter 9: Information Gain-based ExplorationReal robot exploration experiment using the approach presented in Chapter 9 of this thesis. We used an ActivMedia Pioneer 2 robot equipped with a SICK laser range finder. The experiments was carried out in building 106, University of Freiburg.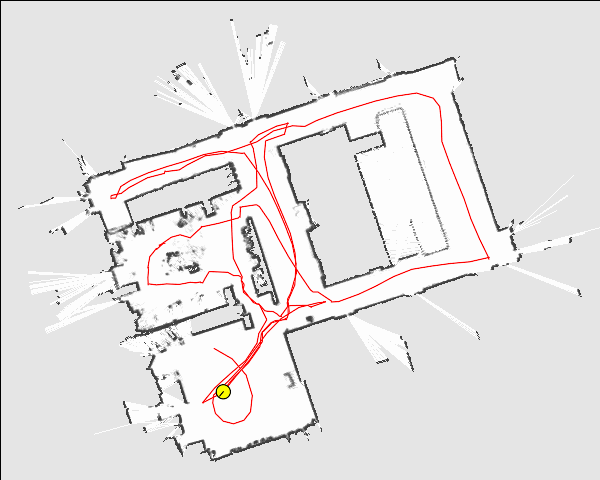
|