Resources |
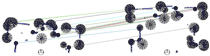 |
FLIRTLib FLIRTLib is a library that implements the Fast Laser Interest Region Transform (FLIRT) introduced by Tipaldi and Arras. The library implements four different multi-scale feature detectors and two feature descriptors for 2D range data. It is written in C++ and comes with an API reference (using Doxygen) and a set of example binaries to visualize the detector results and the descriptors, as well as to perform scan-to-scan matching.
|
|
 |
Octave/Matlab Tutorial A comprehensive 111-slide tutorial on Octave and Matlab for beginners and intermediate to advanced users. It covers variables, data types, matrices, plotting, programming, functions and scripts, file I/O, including code examples and practical hints. |
|
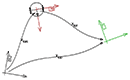 |
librobotics librobotics is a small and useful library of Matlab/Octave functions frequently used in robotics, in particular for plotting. It offers functions to plot different robots, transforms, reference frames, scalable text, error ellipses, or compound operations. librobotics is compatible with both, Octave and Matlab, and sports a full reference documentation.
Download, unpack, and add to your Octave/Matlab path: addpath('librobotics');. To get help, type help command. |
|
 |
AdaBoost in Action This video is the answer to how AdaBoost creates an increasingly stronger classifier by adding weak learners and reweighting the training samples. This video is used in my teaching activities. |
|
 |
Error Ellipses in Action This video is the answer to how the error ellipse changes its look when tweaking the entries of its corresponding covariance matrix! The animation shows the covariance matrix, the error ellipse, the eigenvalues and the correlation coefficient in a wide range of values. Feel free to download, reuse, and reference. This video is used in my teaching activities. |
|
|
Freiburg People Tracker This is our baseline implementation of a laser-based people tracker. Written in C++, it employs Kalman filters, a constant acceleration motion model, and a nearest neighbor data association. The tracker has been developped in order to address questions of situation analysis, that is, the study of techniques that enable robots to better understand their social surrounding. The current implementation tracks multiple targets at up to 200 Hz on a Athlon 2GHz (wait time for the sensor data excluded) |
||
 |
CAS Robot Navigation Toolbox This is a mirror of the CAS Robot Navigation Toolbox for Matlab.
More information: Toolbox homepage and projects page |