Jannik Zürn

|
Albert-Ludwigs-Universität Freiburg |
This website is only updated periodically. For more information, please visit my personal homepage.
About me
- I left the University of Freiburg and started a new chapter working at Wayve.
- 10/2022 - 02/2023: Visiting PhD Student at Oxford Robotics Institute, University of Oxford (collaboration with Prof. Ingmar Posner)
- 12/2018 - 11/2023: Working at the Autonomous Intelligent Systems group of Prof. Dr. Wolfram Burgard as Ph.D. student.
- 07/2017 - 10/2017: Internship, Robotics Software Engineering at Mayfield Robotics, Redwood City, CA, US
- 08/2015 - 10/2018: Master of Science in Theoretical Mechanical Engineering with minor in Computational Mechanics and Robotics, Karlsruhe Institute of Technology (KIT)
- 10/2011 - 08/2015: Bachelor of Science in Mechanical Engineering with minor in Continuum Mechanics, Karlsruhe Institute of Technology (KIT)
Research Interests
For my PhD, I am mainly interested in autonomous urban navigation with multi-modal and self-supervised learning. In my research, I aim at bringing Robotics and Artificial Intelligence, especially Deep Learning, closer together. My goal is to enable autonomous robots to better understand their surroundings with the sensors they have and to allow them to more accurately and robustly navigate through those surroundings; especially in presence of adversarial influences such as sensor noise, uncertainties, and occlusion. Self-supervised learning with multiple sensor modalities plays a particularly important role in this endeavour as it allows us to avoid expensive and time-consuming labeling of data which is necessary for fully supervised learning.- Robot Perception
- Weakly-Supervised Robot Learning
- Self-Supervised Robot Learning
You can find my CV here.

Aggregated LiDAR scans

My research platform "Obelix"
After many years, still functional!

Outdoor programming

Hardware development on our autonomous boat

Our autonomous boat in Breisach, Germany
Testing system functionality
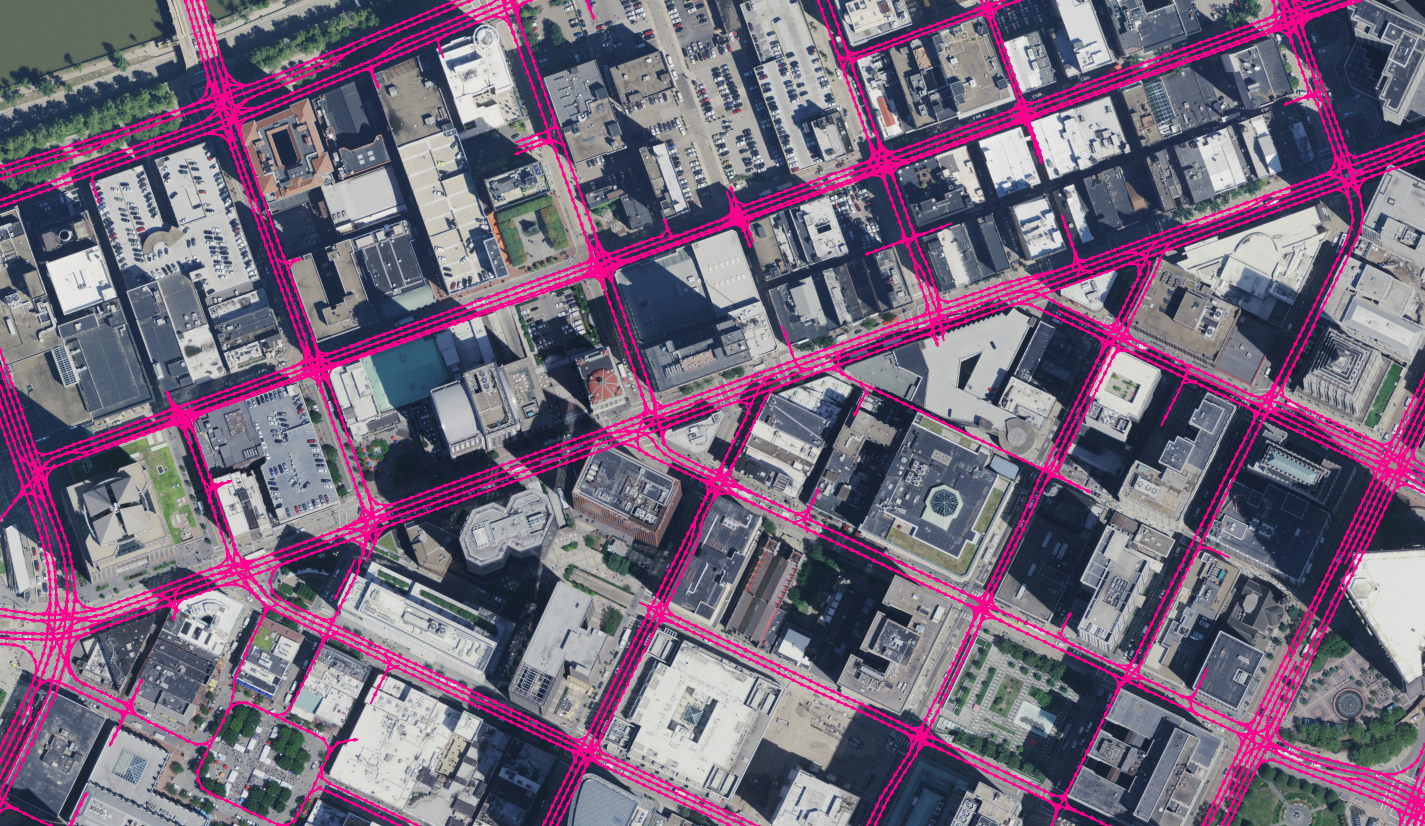
Lane graph for the city of Pittsburgh, PA
Current Research Projects
Teaching
- Masterpraktikum Deep Learning Lab, Summer Term 2019
- FreiCar: Practical Autonomous Driving, Winter Term 2020/21
- FreiCar: Practical Autonomous Driving, Summer Term 21
- Seminar Robot Perception for Navigation, Winter Term 2022/23
Supervised Students
- Semantic Segmentation of Curb and Curb Cuts in Street Imagery, Y. Satyawan, 2019, Bachelor Thesis
- Multimodal Object Tracking with Deep Learning, T. Krautschneider, 2019, Bachelor Thesis
- Optical Flow based Window Detection, G. Stief, 2020, Bachelor Thesis
- Sound Event Localization and Detection, S. Al-Rawi, 2021, Master Thesis
- Self-Supervised Road Crossing Detection for Pedestrian Robots, S. Weber, 2022, Master Thesis
Publications
Conference Papers
-
Martin Büchner*, Jannik Zürn*, Ion-George Todoran,
Abhinav Valada, Wolfram Burgard
NEW: Learning and Aggregating Lane Graphs for Urban Automated Driving
IEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR), 2023.
Download Website BibTeX -
Jannik Zürn*, Sebastian Weber*,
Wolfram Burgard
TrackletMapper: Ground Surface Segmentation and Mapping from Traffic Participant Trajectories
Conference on Robot Learning (CoRL), 2022.
Download Website BibTeX -
Jannik Zürn,
Wolfram Burgard
Self-Supervised Moving Vehicle Detection from Audio-Visual Cues
IEEE Robotics and Automation Letters | IEEE International Conference on Intelligent Robots and Systems (IROS), 2022.
Download Website BibTeX -
Johan Vertens*,
Jannik Zürn*,
Wolfram Burgard
HeatNet: Bridging the Day-Night Domain Gap in Semantic Segmentation with Thermal Images
IEEE International Conference on Intelligent Robots and Systems (IROS), 2020.
Download Website BibTeX
Journal Articles
-
Jannik Zürn, Ingmar Posner, Wolfram Burgard
NEW: AutoGraph: Predicting Lane Graphs from Traffic Observations
Arxiv Preprint 2306.15410
Download Website BibTeX -
Jannik Zürn*,
Johan Vertens*,
Wolfram Burgard
Lane Graph Estimation for Scene Understanding in Urban Driving
IEEE Robotics and Automation Letters, 2021.
Download Website BibTeX -
Jannik Zürn,
Wolfram Burgard
Abhinav Valada
Self-Supervised Visual Terrain Classification from Unsupervised Acoustic Feature Learning
IEEE Transactions on Robotics, 2021.
Download Website Video BibTeX