Nichola Abdo
Research
Robot Learning from Demonstrations
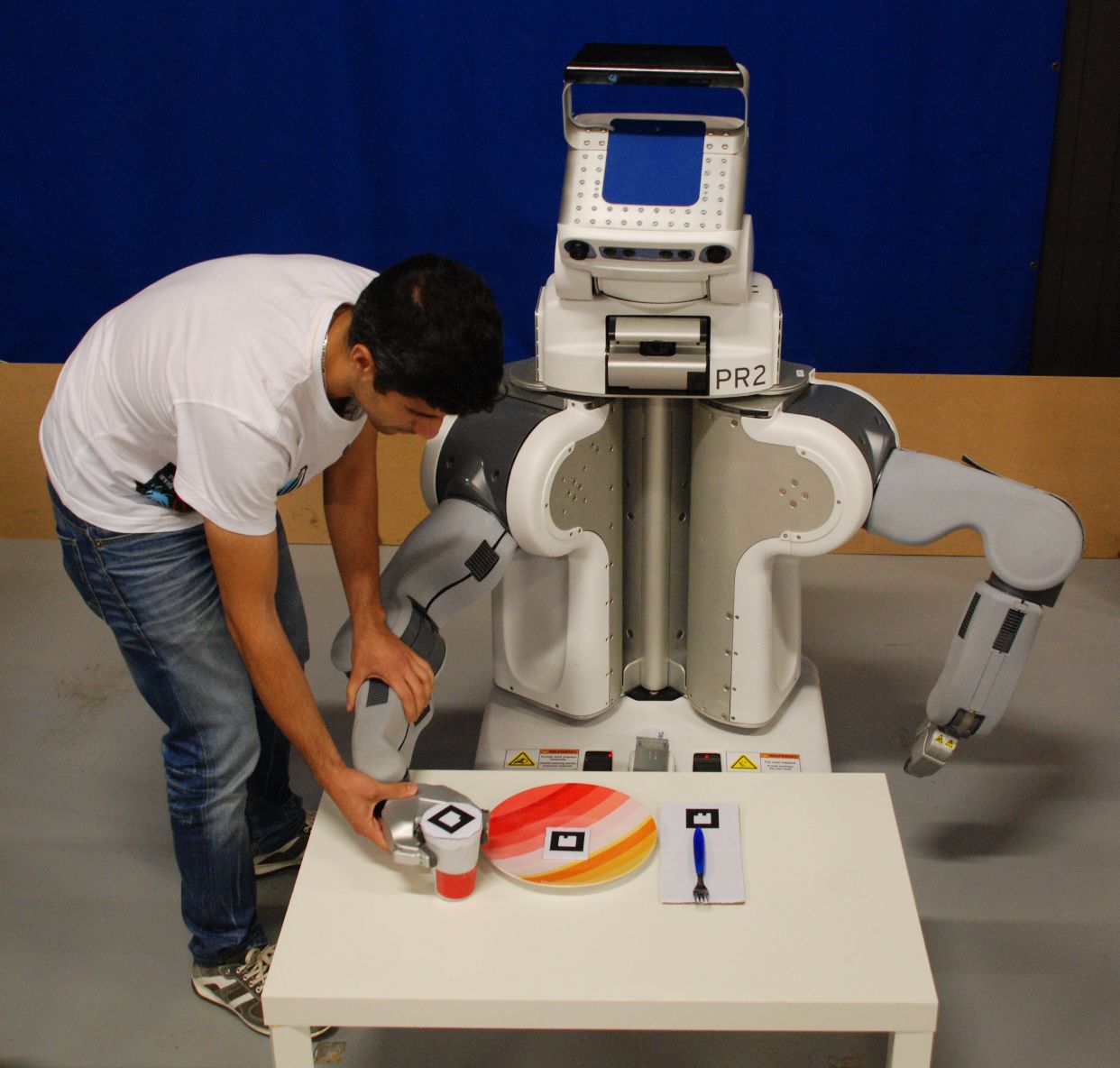
I am interested in investigating techniques for robot learning from demonstrations. My focus is on developing approaches that allow a robot to learn the relevant features necessary to reproduce actions successfully, and to infer this from a small number of teacher demonstrations. Learning such feature abstractions is necessary for robots to be able to generalize actions to new settings and to plan for solving complex tasks.
Relevant papers:
Nichola Abdo, Luciano Spinello, Wolfram Burgard, and Cyrill Stachniss
Inferring What to Imitate in Manipulation Actions by Using a Recommender System
IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 2014.
[PDF] [Video]
Nichola Abdo, Henrik Kretzschmar, Luciano Spinello, and Cyrill Stachniss
Learning Manipulation Actions from a Few Demonstrations.
IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 2013.
[PDF] [Videos]
Nichola Abdo, Henrik Kretzschmar, and Cyrill Stachniss
From Low-Level Trajectory Demonstrations to Symbolic Actions for Planning.
In Proc. of the Workshop on Combining Task and Motion Planning for Real-World Applications (TAMPRA) at the International Conference on Automated Planning and Scheduling (ICAPS), Atibaia, São Paulo, Brazil, 2012.
[PDF]
Learning Task Preferences of Users

Personal robots must be able to perform tasks for users by predicting and following their subjective preferences. I am interested in developing approaches that combine crowdsourcing with data mining techniques like collaborative filtering to learn such preferences from large numbers of examples. We aim to discover latent patterns in user preferences that are learned over time across different environments, in order to guide the robot to tailor its actions when performing a task in a new environment.
Relevant papers:
Nichola Abdo, Cyrill Stachniss, Luciano Spinello, Wolfram Burgard
Robot, Organize my Shelves! Tidying up Objects by Predicting User Preferences
IEEE International Conference on Robotics and Automation (ICRA), Seattle, USA, 2015.
Best service robotics paper award finalist.
[PDF] [Video]
Nichola Abdo, Luciano Spinello, Cyrill Stachniss, Wolfram Burgard
Collaborative Filtering for Learning User Preferences for Robotic Tasks
Workshop on Learning Plans with Context from Human Signals at Robotics: Science and Systems (R:SS), Berkeley, USA, 2014.
[PDF]
More details here!
Planning and Action Control under Uncertainty for Mobile Manipulation Tasks in Human Environments

As part of the DFG research unit on hybrid reasoning for intelligent systems (Hybris), I am interested in developing active perception techniques that allow a robot to reason about the information it needs to complete a task. This project aims at combining perception, manipulation, and high-level reasoning and planning approaches to enable robots to perform complex tasks in domestic environments.
Relevant papers:
Christoph Schwering, Tim Niemueller, Gerhard Lakemeyer, Nichola Abdo, Wolfram Burgard
Sensor Fusion in the Epistemic Situation Calculus
International Cognitive Robotics Workshop (CogRob) at the European Conference on Artificial Intelligence (ECAI), Prague, Czech Republic, 2014.
[PDF]
Tim Niemueller, Nichola Abdo, Andreas Hertle, Gerhard Lakemeyer, Wolfram Burgard, Bernhard Nebel
Towards Deliberative Active Perception using Persistent Memory
In Proc. of the Workshop on AI-based Robotics at the International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 2013.
[PDF] [Video]
Research
Robot Learning from Demonstrations
Relevant papers:
Nichola Abdo, Luciano Spinello, Wolfram Burgard, and Cyrill Stachniss
Inferring What to Imitate in Manipulation Actions by Using a Recommender System
IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 2014.
[PDF] [Video]
Nichola Abdo, Henrik Kretzschmar, Luciano Spinello, and Cyrill Stachniss
Learning Manipulation Actions from a Few Demonstrations.
IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 2013.
[PDF] [Videos]
Nichola Abdo, Henrik Kretzschmar, and Cyrill Stachniss
From Low-Level Trajectory Demonstrations to Symbolic Actions for Planning.
In Proc. of the Workshop on Combining Task and Motion Planning for Real-World Applications (TAMPRA) at the International Conference on Automated Planning and Scheduling (ICAPS), Atibaia, São Paulo, Brazil, 2012.
[PDF]
Learning Task Preferences of Users
Personal robots must be able to perform tasks for users by predicting and following their subjective preferences. I am interested in developing approaches that combine crowdsourcing with data mining techniques like collaborative filtering to learn such preferences from large numbers of examples. We aim to discover latent patterns in user preferences that are learned over time across different environments, in order to guide the robot to tailor its actions when performing a task in a new environment.
Relevant papers:
Nichola Abdo, Cyrill Stachniss, Luciano Spinello, Wolfram Burgard
Robot, Organize my Shelves! Tidying up Objects by Predicting User Preferences
IEEE International Conference on Robotics and Automation (ICRA), Seattle, USA, 2015.
Best service robotics paper award finalist.
[PDF] [Video]
Nichola Abdo, Luciano Spinello, Cyrill Stachniss, Wolfram Burgard
Collaborative Filtering for Learning User Preferences for Robotic Tasks
Workshop on Learning Plans with Context from Human Signals at Robotics: Science and Systems (R:SS), Berkeley, USA, 2014.
[PDF]
Planning and Action Control under Uncertainty for Mobile Manipulation Tasks in Human Environments
As part of the DFG research unit on hybrid reasoning for intelligent systems (Hybris), I am interested in developing active perception techniques that allow a robot to reason about the information it needs to complete a task. This project aims at combining perception, manipulation, and high-level reasoning and planning approaches to enable robots to perform complex tasks in domestic environments.
Relevant papers:
Christoph Schwering, Tim Niemueller, Gerhard Lakemeyer, Nichola Abdo, Wolfram Burgard
Sensor Fusion in the Epistemic Situation Calculus
International Cognitive Robotics Workshop (CogRob) at the European Conference on Artificial Intelligence (ECAI), Prague, Czech Republic, 2014.
[PDF]
Tim Niemueller, Nichola Abdo, Andreas Hertle, Gerhard Lakemeyer, Wolfram Burgard, Bernhard Nebel
Towards Deliberative Active Perception using Persistent Memory
In Proc. of the Workshop on AI-based Robotics at the International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 2013.
[PDF] [Video]