Juergen Hess
|
Albert-Ludwigs-Universität Freiburg |
I am a Ph.D. student at the Autonomous Intelligent Systems Lab at the University of Freiburg. Currently, I am working on the newly starting SQUIRREL EU project where I am concerned with 3D mapping with an RGBD camera. My research interests are machine learning, artificial intelligence and robotics. I am especially interested in 3D mapping and object reconstruction, robot manipulation, surface coverage, and kernel methods. |
Research Projects
TidyUpRobot

The goal of this project was to investigate the theoretical and practical problems of enabling a household robot to
reliably and autonomously clear objects from a table and return them to where they belong.
This is a complex task that required research in many areas such as navigation, perception, manipulation and planning.
The robot, for example, does not only need a 2D but also a 3D map to safely navigate in the environment.
It has to recognize objects, handle them appropriately and plan an efficient action sequence.
Due to the very different tasks, for the TidyUpRobot project three labs from the University of Freiburg cooperated.
That is the
Autonomous Intelligent Systems lab,
the Research Group on the Foundations of Artificial Intelligence and the
Machine Learning Lab.
All source code of the project as well as tutorials on how to use it on the PR2 are available (see link on the right).
KARIS (Kleinskaliges Autonomes Redundantes Intralogistik-System)

The KARIS project aims at creating a flexible transportation platform for logistics.
In warehouses there are usually long systems of conveyer belts that transport goods.
However, the cost of installing and maintaining a conveyer belt are very high and they are only cost efficient
if there is a large flow of goods.
This project aims at creating a relatively low-cost mobile platform the transport with changing goals and low flow of goods.
The project includes the building of the hardware as well as the development of the software.
It is a cooperation with many industry partners and manages by the KIT.
Our challenge in this project is to create maps and safely navigate in highly ambiguous and dynamically changing environments.
Teaching
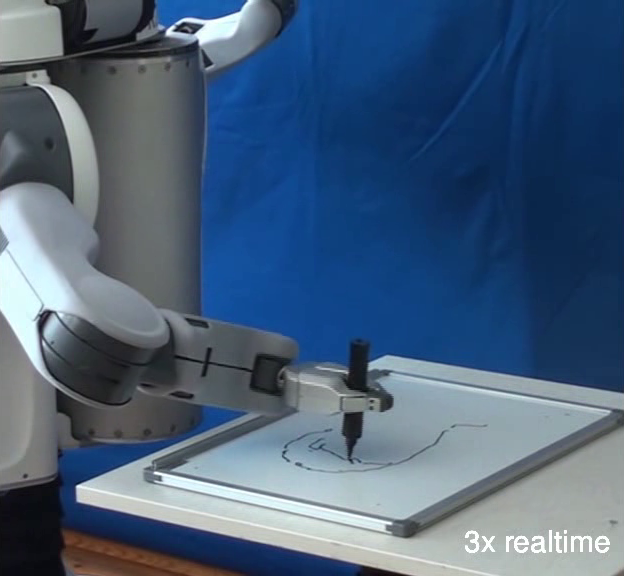
PortraitBot Student Project (2011)
The portrait bot is a bachelor project that I supervised together with my collegue
Felix Endres. Eight students in four groups created a software that first recognizes faces and extracts that part of the image.
From the face image, edges are extracted. The edge image is then vectorized and scaled to extract suitable paths.
After manually showing the PR2 the size of the whiteboard, in the final step the PR2 draws the image is drawn.


Introduction to Artificial Intelligence (2013)
Seminar Humanoid Robots (2013)
Introduction to Mobile Robotics (2011)
RGBD-SLAM: Open Source Software for 3D Mapping
RGBD-SLAM is a software that I have developed together with my collegue Felix Endres.
It is a SLAM system that can be used to create 3D models of the environment using an RGBD camera like the Microsoft Kinect.
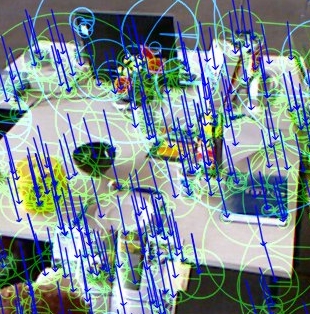
The pictures below visualize some of the steps for creating a 3D model.
Using the color image on the left visual features are extracted and match to subsequent frames.
The resulting corresspondences are shown in the third picture.
Using the depth information, shown in the second image, the local transformation between two camera poses can be computed.
We then use the nonlinear least squares framework g2O to compute a globally consistant
estimate of the trajectory of the camera. In the final step, one can create a 3D model from the registered pointcloud by e.g. using
a truncated signed distance function. We used the library CPU_TSDF by Stephen Miller
to create the result in the last picture.



Publications
TRO 2014

F. Endres and J. Hess and J. Sturm and D. Cremers and W. Burgard
3D Mapping with an RGB-D Camera
Transactions on Robotics, 2014.
3D Mapping with an RGB-D Camera
Transactions on Robotics, 2014.
ICRA 2014
(accepted)
(accepted)
J. Hess, M. Beinhofer, W. Burgard
A Probabilistic Approach to High-Confidence Cleaning Guarantees for Low-Cost Cleaning Robots
Accepted for publication at ICRA 2014.
A Probabilistic Approach to High-Confidence Cleaning Guarantees for Low-Cost Cleaning Robots
Accepted for publication at ICRA 2014.
ICRA 2013

J. Hess, M. Beinhofer, D. Kuhner, P. Ruchti, W. Burgard
Poisson-Driven Dirt Maps for Efficient Robot Cleaning
In Proc. of the IEEE/RSJ International Conference on Robotics and Automation (ICRA), 2013.
Poisson-Driven Dirt Maps for Efficient Robot Cleaning
In Proc. of the IEEE/RSJ International Conference on Robotics and Automation (ICRA), 2013.
IROS 2012

J. Hess, G.D. Tipaldi, W. Burgard
Null Space Optimization for Effective Coverage of 3D Surfaces using Redundant Manipulators
In Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2012.
Null Space Optimization for Effective Coverage of 3D Surfaces using Redundant Manipulators
In Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2012.
ICRA 2012

F. Endres, J. Hess, N. Engelhard, J. Sturm, D. Cremers, W. Burgard,
An Evaluation of the RGB-D SLAM System
In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2012.
An Evaluation of the RGB-D SLAM System
In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2012.
AT 2012

F. Endres, J. Hess, N. Engelhard, J. Sturm, W. Burgard,
6D Visual SLAM for RGB-D Sensors
at - Automatisierungstechnik, 2012.
6D Visual SLAM for RGB-D Sensors
at - Automatisierungstechnik, 2012.
ERF WS 2011

N. Engelhard, F. Endres, J. Hess, J. Sturm, W. Burgard
Real-time 3D visual SLAM with a hand-held camera
In Proc. of the RGB-D Workshop on 3D Perception in Robotics at the European Robotics Forum, 2011.
Real-time 3D visual SLAM with a hand-held camera
In Proc. of the RGB-D Workshop on 3D Perception in Robotics at the European Robotics Forum, 2011.
ICRA WS 2011

J. Hess, J. Sturm, W. Burgard
Learning the State Transition Model to Efficiently Clean Surfaces with Mobile Manipulation Robots
In Proc. of the Workshop on Manipulation under Uncertainty at the IEEE Int. Conf. on Robotics and Automation (ICRA), 2011.
Learning the State Transition Model to Efficiently Clean Surfaces with Mobile Manipulation Robots
In Proc. of the Workshop on Manipulation under Uncertainty at the IEEE Int. Conf. on Robotics and Automation (ICRA), 2011.
IROS 2010

D. Meyer-Delius, J. Hess, G. Grisetti and W. Burgard
Temporary Maps for Robust Localization in Semi-static Environments
In Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2010.
Temporary Maps for Robust Localization in Semi-static Environments
In Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2010.
2008

Jürgen Hess
Master Thesis: Characterizing Dynamic Objects in 3D Laser Range Data.
MSc Thesis, University of Freiburg, Dept. of Computer Science, 2008.
Master Thesis: Characterizing Dynamic Objects in 3D Laser Range Data.
MSc Thesis, University of Freiburg, Dept. of Computer Science, 2008.
