Datasets
|
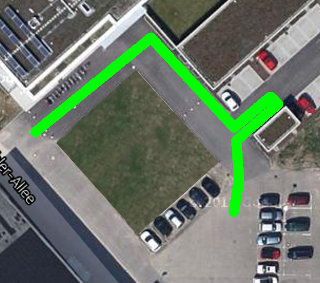
Datasets for the localization of Google Tango devices in 2D floor plans These datasets correspond to the experiments described in 'Accurate Indoor Localization with a Google Tango Device in 2D Floor Plans'. |
 |
|
Remission Calibration Obelix Dataset of 3D scans from our robot Obelix. The purpose of this dataset was to test the calibration for the laser remission values as described in this paper: Bastian Steder, Michael Ruhnke, Rainer Kümmerle, and Wolfram Burgard. Maximum Likelihood Remission Calibration for Groups of Heterogeneous Laser Scanners. In Proc. of the IEEE Int. Conf. on Robotics&Automation (ICRA). 2015. |
 Background image source: Google Earth© |
| Freiburg Campus 360deg scans |
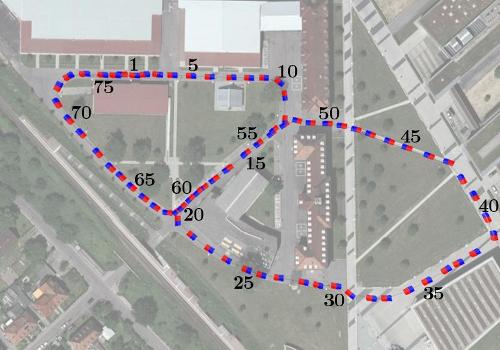 Background image source: Google Earth©
|
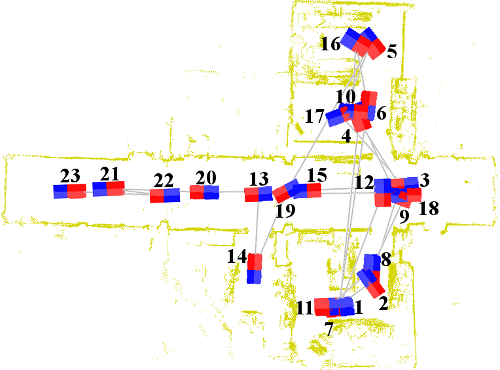
| Quadrotor 079 Freiburg 3D scans |
 |